公司新闻信息详情
【视觉龙】高精度视觉对位贴合技术,继深度学习的外观检测后,龙睿产品又添新功能。
发布时间:2019-06-29 阅读次数:1260 “龙睿DragonVision智能相机”是一款不用编程的可配置的通用型视觉软件平台,使用简单无技术背景也可上手操作。DragonVision包含了上百种算法,架构开放,支持多线程多任务并行处理。可以对接2D视觉+3D视觉+彩色视觉+深度学习检测等需求。


“龙睿DragonVision智能相机”专用型新增了自动标定功能、坐标转换工具、纠偏计算工具、抓取工具、组合定位工具、记录点位工具、切换配置工具等。可以用于贴辅料、背光板膜片贴合、液晶屏组装、IC芯片贴合等。
龙睿智能相机拥有业内领先的高速、高精度对位技术,无惧恶劣环境可区分高相似度的物体,并可同时识别多个物体,无论其方位、大小,可以实现μ级定位精度。
校准工具的自动标定
根据拟定好的通讯协议,可完成运动平台与相机的自动标定流程。
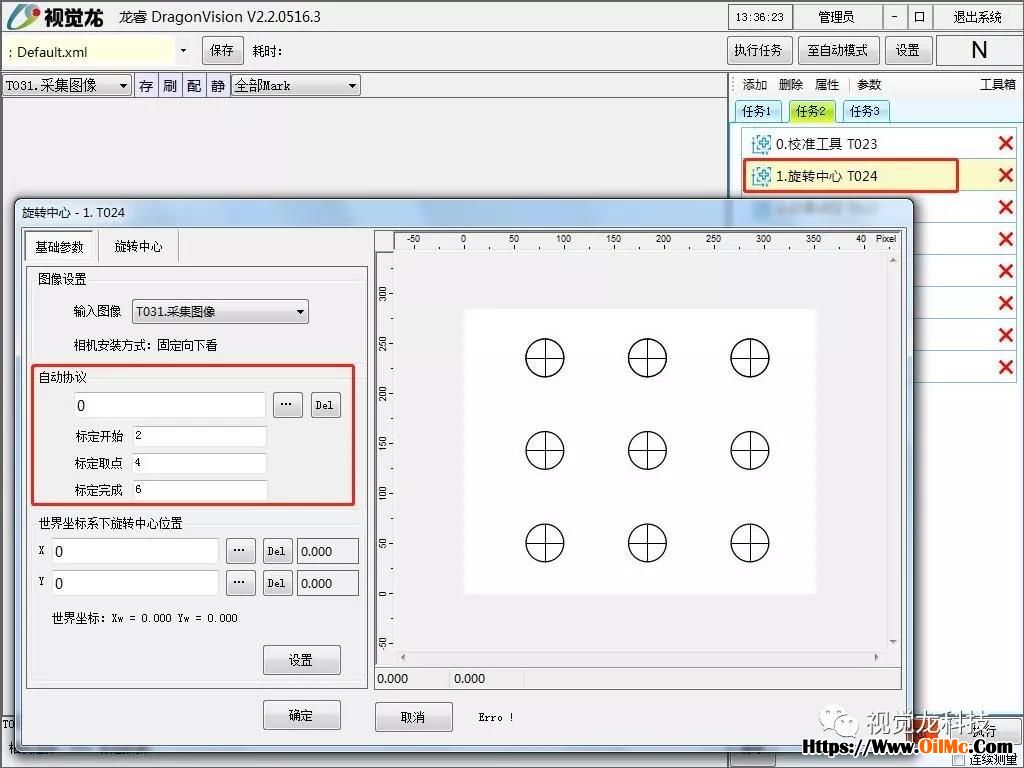
旋转中心工具的自动标定
根据拟定好的通讯协议,可完成运动平台与相机的自动旋转中心标定流程。
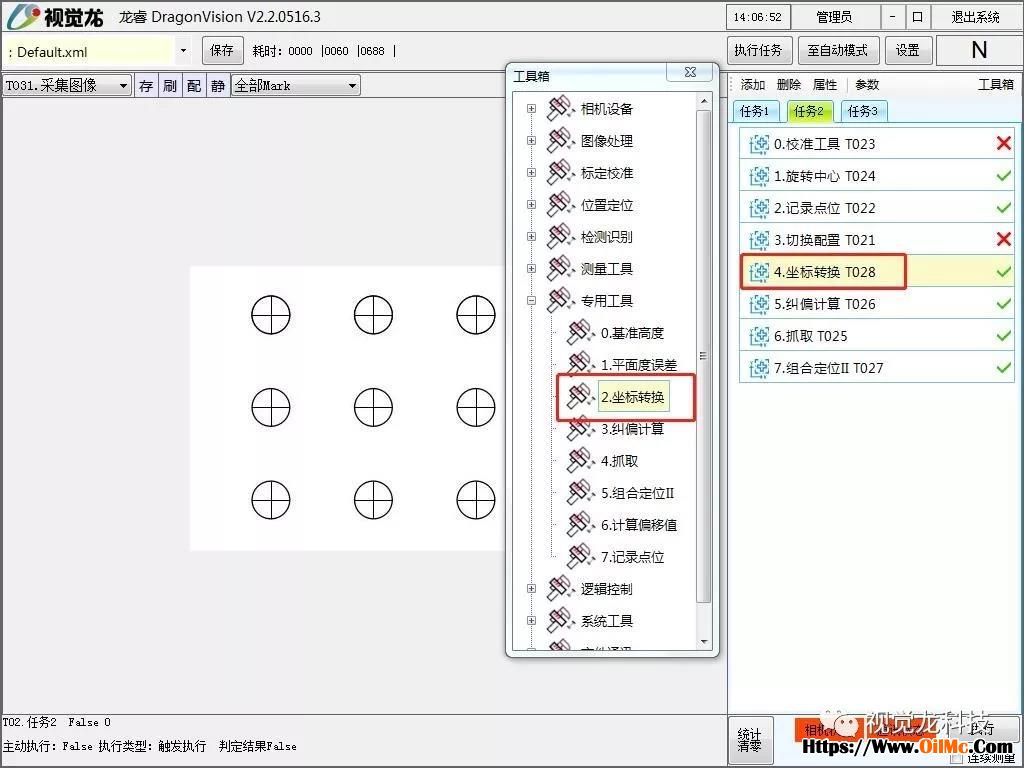
坐标转换工具
设定引用的定位数据结果,点集的选择可从记录点位或读取文本中获取,选取点集中基准点,即可根据新的定位数据转换出新的点集数据。
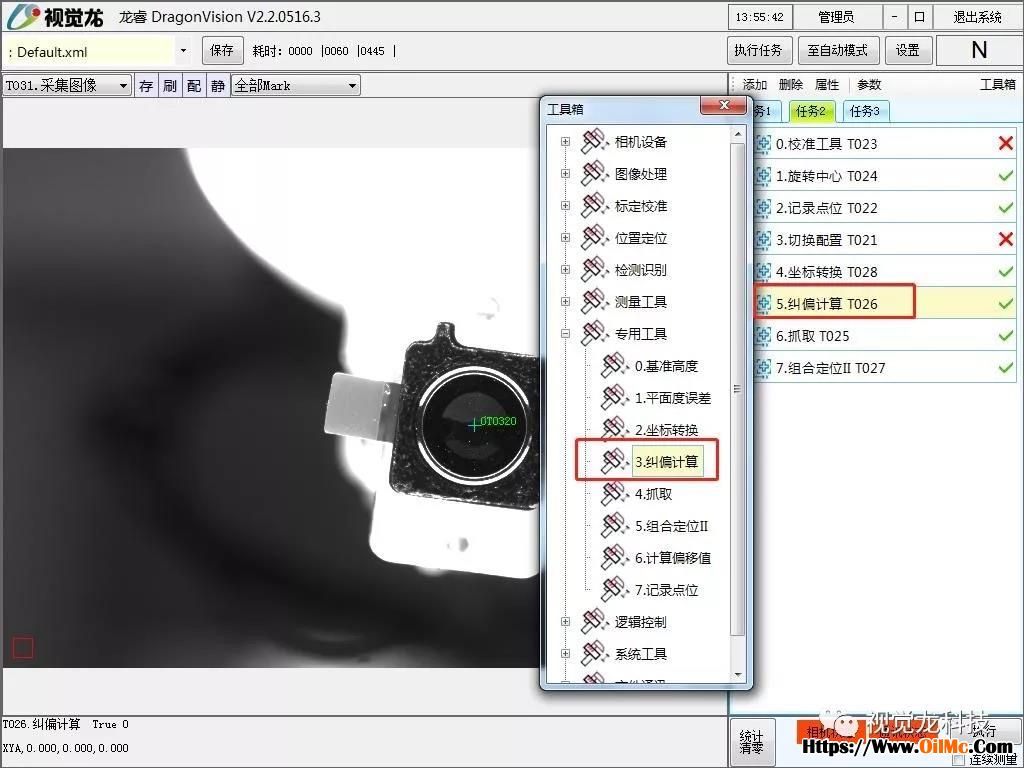
纠偏计算工具
可以引导运动机构完成对位贴合功能。
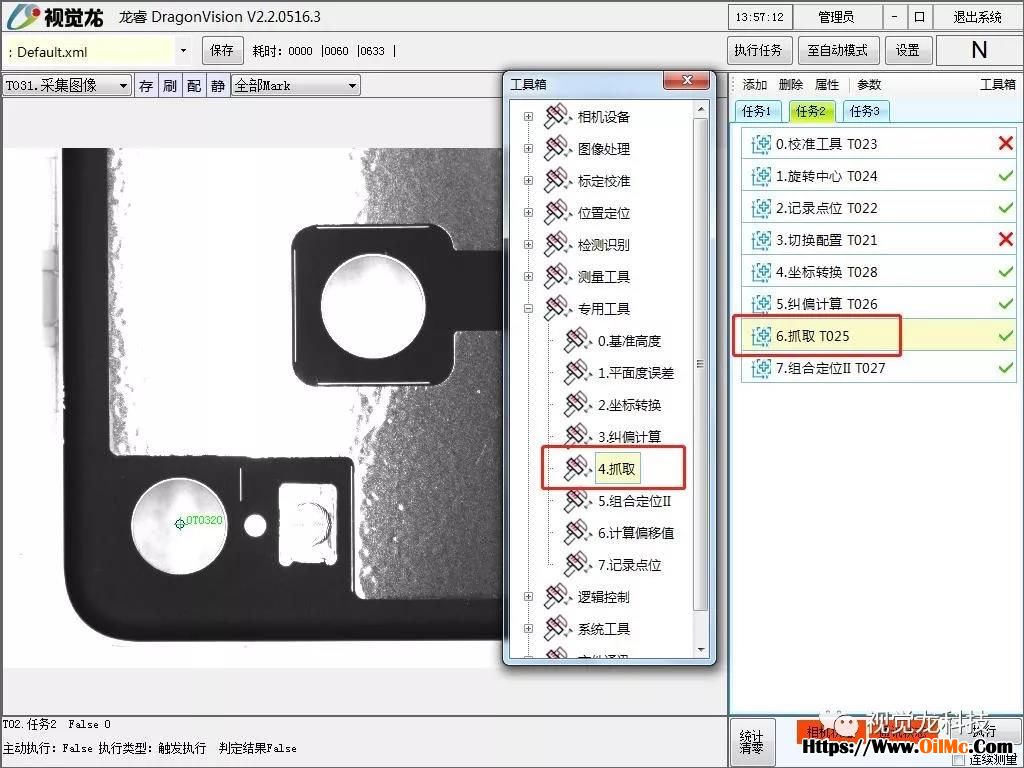
抓取工具
可以引导运动机构抓取目标物体。
组合定位工具
多用于双相机拍摄物体的两个Mark点,计算出对象靶标与目标靶标的相对位置偏差。

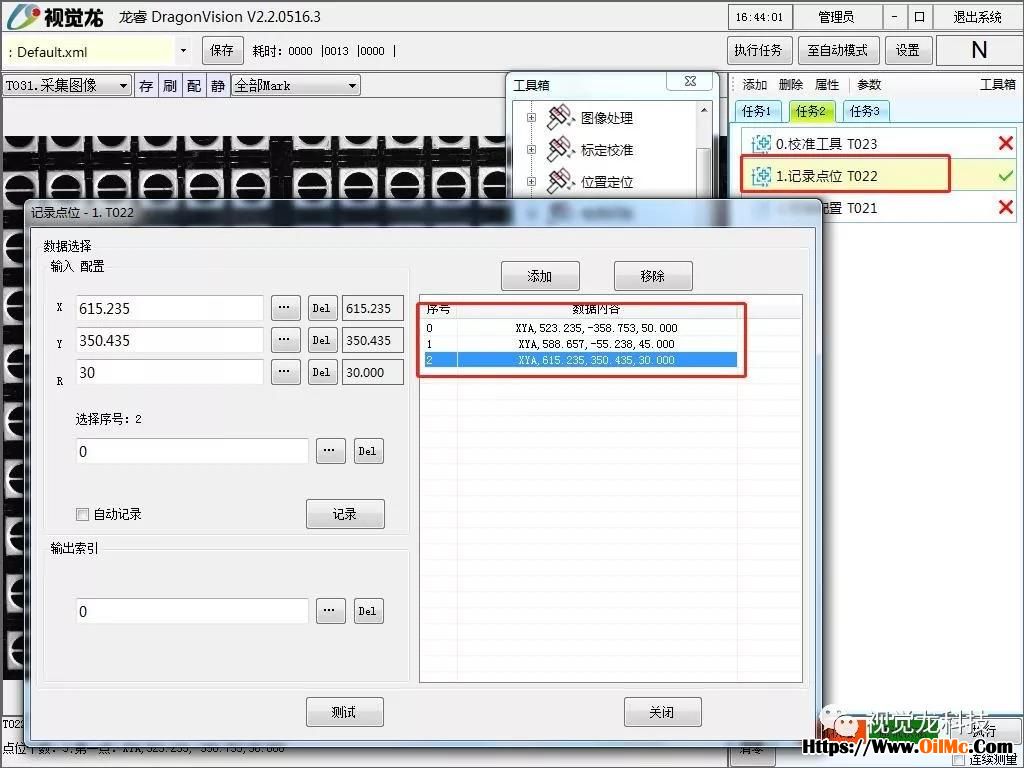
记录点位工具
可以记录固定点位的数据,便于其它工具的引用。
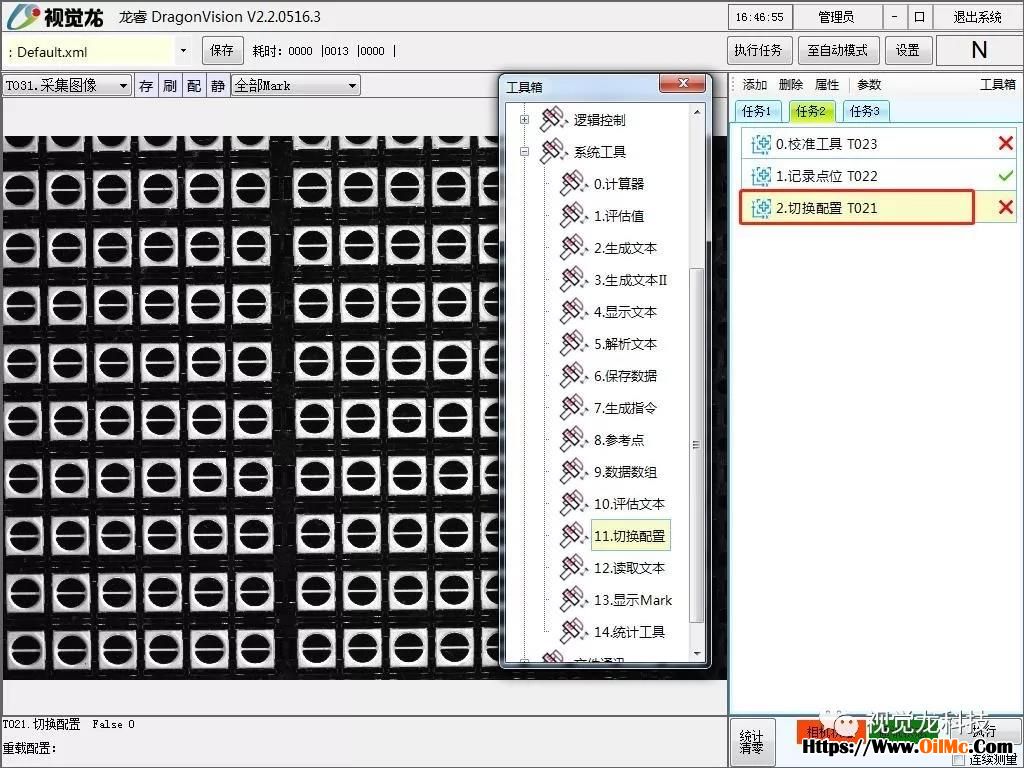
切换配置工具
根据拟定的通讯协议,可完成各个配置的自动切换功能。